
خازنهای ریز ولتاژپایین در کنار یک خطکش
خازن[۱] یا انباره عبارتست از دو صفحهٔ موازی فلزی که در میان آن لایهای از هوا یا عایق قرار دارد. خازنها انرژی الکتریکی را نگهداری میکنند و به همراه مقاومتها، در مدارات تایمینگ استفاده میشوند. همچنین از خازنها برای صاف کردن سطح تغییرات ولتاژ مستقیم استفاده میشود. از خازنها در مدارات بهعنوان فیلتر هم استفاده میشود. زیرا خازنها به راحتی سیگنالهای متناوب را عبور میدهند ولی مانع عبور سیگنالهای مستقیم میشوند.
خازن المان الکتریکی است که میتواند انرژی الکتریکی را توسط میدان الکترواستاتیکی (بار الکتریکی) در خود ذخیره کند. انواع خازن در مدارهای الکتریکی بکار میروند. خازن را با حرف C که ابتدای کلمه capacitor است نمایش میدهند.
با توجه به اینکه بار الکتریکی در خازن ذخیره میشود؛ برای ایجاد
میدانهای الکتریکی یکنواخت میتوان از خازن استفاده کرد. خازنها میتوانند
میدانهای الکتریکی را در حجمهای کوچک نگه دارند؛ به علاوه میتوان از آنها
برای ذخیره کردن انرژی استفاده کرد.
ظرفیت خازن
ظرفیت معیاری برای اندازهگیری توانایی نگهداری انرژی الکتریکی است. ظرفیت زیاد بدین معنی است که خازن قادر به نگهداری انرژی الکتریکی بیشتری است. باید گفت که ظرفیت خازنها یک کمیت فیزیکیست و به ساختمان خازن وابستهاست و به مدار و اختلاف پتانسیل بستگی ندارد.
واحد اندازه گیری ظرفیت فاراد است. ۱ فاراد واحد بزرگی است و مشخص کننده ظرفیت بالا میباشد. بنابراین استفاده از واحدهای کوچکتر نیز در خازنها مرسوم است. میکروفاراد (µF)، نانوفاراد (nF) و پیکوفاراد (pF) واحدهای کوچکتر فاراد هستند.
نسبت مقدار باری که روی صفحات انباشته میشود بر اختلاف پتانسیل دو سر باتری را ظرفیت خازن (C) گویند؛ که مقداری ثابت است.

در این رابطه:
- C = ظرفیت خازن بر حسب فاراد
- Q = بار ذخیره شده برحسب کولن
- V = اختلاف پتانسیل دو سر مولد برحسب ولت
- ε0 = قابلیت گذر دهی خلا است که برابر است با:
- k (بدون یکا) = ثابت دیالکتریک است که برای هر مادهای فرق دارد. تقریباً برای هوا و خلأ 1=K است و برای محیطهای دیگر مانند شیشه و روغن ۱
- A = سطح خازن بر حسب

- d =فاصله بین دو صفه خازن بر حسب متر(m)
چند نکته
- آزمایش نشان میدهد که ظرفیت یک خازن به اندازه بار (q) و به اختلاف
پتانسیل دو سر خازن (V) بستگی ندارد بلکه به نسبت q/v بستگی دارد.
- بار الکتریکی ذخیره شده در خازن با اختلاف پتانسیل دو سر خازن نسبت مستقیم دارد.
- ظرفیت خازن با فاصله بین دو صفحه نسبت عکس دارد.
- ظرفیت خازن با مساحت هر یک از صفحات و جنس دیالکتریک (K) نسبت مستقیم دارد.
ساختمان خازن

یک نمایش ساده از خازنی با صفحههای موازی
ساختمان داخلی خازن از دو قسمت اصلی تشکیل میشود:
هرگاه دو هادی در مقابل هم قرار گرفته و در بین آنها عایقی قرار داده شود، تشکیل خازن میدهند. معمولاً صفحات هادی خازن از جنس آلومینیوم، روی و نقره با سطح نسبتاً زیاد بوده و در بین آنها عایقی (دیالکتریک) از جنس هوا، کاغذ، میکا، پلاستیک، سرامیک، اکسید آلومینیوم و اکسید تانتالیوم استفاده میشود. هر چه ضریب دیالکتریک
یک ماده عایق بزرگتر باشد آن دیالکتریک دارای خاصیت عایقی بهتر است. به
عنوان مثال، ضریب دیالکتریک هوا ۱ و ضریب دیالکتریک اکسید آلومینیوم ۷
میباشد. بنابراین خاصیت عایقی اکسید آلومینیوم ۷ برابر خاصیت عایقی هوا
است.
انواع خازن
خازنها بر حسب ثابت یا متغیر بودن ظرفیت به دو گروه کلی ثابت و متغیر
تقسیمبندی میشوند. خازنها انواع مختلفی دارند و از لحاظ شکل و اندازه با
یک دیگر متفاوتاند. بعضی از خازنها از روغن پر شده و بسیار حجیماند.
خازنهای ثابت
این خازنها دارای ظرفیت معینی هستند که در وضعیت معمولی تغییر پیدا
نمیکنند. خازنهای ثابت را بر اساس نوع ماده دیالکتریک به کار رفته در
آنها تقسیم بندی و نامگذاری میکنند و از آنها در مصارف مختلف استفاده
میشود. از جمله این خازنها میتوان انواع سرامیکی، میکا، ورقهای (کاغذی و
پلاستیکی)، الکترولیتی، روغنی، گازی و نوع خاص فیلم (Film) را نام برد.
اگر ماده دیالکتریک طی یک فعالیت شیمیایی تشکیل شده باشد آن را خازن الکترولیتی و در غیر این صورت آن را خازن خشک گویند. خازنهای روغنی و گازی در صنعت برق بیشتر در مدارهای الکتریکی برای راه اندازی و یا اصلاح ضریب قدرت به کار میروند. بقیه خازنهای ثابت دارای ویژگیهای خاصی هستند.
- خازنهای ثابت:
- سرامیکی
- خازنهای ورقهای
- خازنهای میکا
- خازنهای الکترولیتی
- آلومینیومی
- تانتالیوم
خازنهای سرامیکی
خازن سرامیکی (به انگلیسی: Ceramic capacitor) معمولترین خازن غیر الکترولیتی است که در آن دیالکتریک بکار رفته از جنس سرامیک
است. ثابت دیالکتریک سرامیک بالا است، از این رو امکان ساخت خازنهای با
ظرفیت زیاد در اندازه کوچک را در مقایسه با سایر خازنها بوجود آورده، در
نتیجه ولتاژ کار آنها بالا خواهد بود. ظرفیت خازنهای سرامیکی معمولاً بین ۵
پیکوفاراد تا ۱/۰ میکروفاراد است. این نوع خازن به صورت دیسکی (عدسی) و استوانهای تولید میشود و بسامد کار خازنهای سرامیکی بالای ۱۰۰ مگاهرتز است. عیب بزرگ این خازنها وابسته بودن ظرفیت آنها به دمای
محیط است، زیرا با تغییر دما ظرفیت خازن تغییر میکند. از این خازن در
مدارهای الکترونیکی، مانند مدارهای مخابراتی و رادیویی استفاده میشود.
خازنهای ورقهای
در خازنهای ورقهای از کاغذ و مواد پلاستیکی به سبب انعطاف پذیری آنها، برای دیالکتریک استفاده میشود. این گروه از خازنها خود به دو صورت ساخته میشوند:
خازنهای کاغذی
دیالکتریک این نوع خازن از یک صفحه نازک کاغذ متخلخل تشکیل شده که یک دیالکتریک مناسب درون آن تزریق میگردد تا مانع از جذب رطوبت گردد. برای جلوگیری از تبخیر
دیالکتریک درون کاغذ، خازن را درون یک قاب محکم و نفوذناپذیر قرار
میدهند. خازنهای کاغذی به علت کوچک بودن ضریب دیالکتریک عایق آنها دارای
ابعاد فیزیکی بزرگ هستند، اما از مزایای این خازنها آن است که در ولتاژها و
جریانهای زیاد میتوان از آنها استفاده کرد.
خازنهای پلاستیکی
در این نوع خازن از ورقههای نازک پلاستیک برای دیالکتریک استفاده میشود. ورقههای پلاستیکی همراه با ورقههای نازک فلزی (آلومینیومی) به صورت لوله، در درون قاب پلاستیکی بسته بندی میشوند. امروزه این نوع خازنها به دلیل داشتن مشخصات خوب در مدارات زیاد به کار میروند. این خازنها نسبت به تغییرات دما حساسیت زیادی ندارند، به همین سبب از آنها در مداراتی استفاده میکنند که احتیاج به خازنی با ظرفیت ثابت در مقابل حرارت باشد. یکی از انواع دیالکتریکهایی که در این خازنها به کار میرود پلی استایرن (به انگلیسی: Polystyrene) است، از این رو به این خازنها «پلی استر» گفته میشود که از جمله رایجترین خازنهای پلاستیکی است. ماکزیمم بسامد کار خازنهای پلاستیکی حدود یک مگاهرتز است.
خازنهای میکا
در این نوع خازن از ورقههای نازک میکا در بین صفحات خازن (ورقههای فلزی – آلومینیوم) استفاده میشود و در پایان، مجموعه در یک محفظه قرار داده میشوند تا از اثر رطوبت جلوگیری شود. ظرفیت خازنهای میکا تقریباً بین 0/01 تا ۱ میکروفاراد است. از ویژگیهای اصلی و مهم این خازنها میتوان داشتن ولتاژ کار بالا، عمر طولانی و کاربرد در مدارات فرکانس بالا را نام برد.
خازنهای الکترولیتی
این نوع خازنها معمولاً در رنج میکروفاراد هستند. خازنهای الکترولیتی همان خازنهای ثابت هستند، اما اندازه و ظرفیتشان از خازنهای ثابت بزرگتر است. نام دیگر این خازنها، خازن شیمیایی است. علت نامیدن آنها به این نام این است که دیالکتریک این خازنها را به نوعی مواد شیمیایی آغشته میکنند که در عمل، حالت یک کاتالیزور
را دارا میباشند و باعث بالا رفتن ظرفیت خازن میشوند. برخلاف خازنهای
عدسی، این خازنها دارای قطب یا پایه مثبت و منفی میباشند. روی بدنه خازن
کنار پایه منفی، علامت – نوشته شدهاست. مقدار واقعی ظرفیت و ولتاژ قابل
تحمل آنها نیز روی بدنه درج شدهاست. خازنهای الکترولیتی در دو نوع آلومینیومی و تانتالیومی ساخته میشوند. یکی از کاربردهای گسترده این نوع خازن استفاده در مدار یکسوساز دیودی بعنوان فیلتر dc است.
خازن آلومینیومی
این خازن همانند خازنهای ورقهای از دو ورقه آلومینیومی
تشکیل شدهاست. یکی از این ورقهها که لایه اکسید بر روی آن ایجاد میشود
«آند» نامیده میشود و ورقه آلومینیومی دیگر نقش کاتد را دارد. ساختمان
داخلی آن بدین صورت است که دو ورقه آلومینیومی به همراه دو لایه کاغذ
متخلخل که در بین آنها قرار دارند هم زمان پیچیده شده و سیمهای اتصال نیز
به انتهای ورقههای آلومینیومی متصل میشوند. پس از پیچیدن ورقهها آن را
درون یک الکترولیت
مناسب که شکل گیری لایه اکسید را سرعت میبخشد غوطهور میسازند تا دو
لایه کاغذ متخلخل از الکترولیت پر شوند. سپس کل مجموعه را درون یک قاب فلزی
قرار داده و با یک پولک پلاستیکی که سیمهای خازن از آن میگذرد محکم بسته
میشود.
خازن تانتالیوم
نوشتار اصلی : خازن تانتالیوم
در این نوع خازن به جای آلومینیوم از فلز تانتالیوم استفاده میشود. زیاد بودن ثابت دیالکتریک اکسید تانتالیوم نسبت به اکسید آلومینیوم
(حدوداً ۳ برابر) سبب میشود خازنهای تانتالیومی نسبت به نوع آلومینیومی
درحجم مساوی دارای ظرفیت بیشتری باشند. محاسن خازن تانتالیومی نسبت به نوع
آلومینیومی بدین قرار است:
- ابعاد کوچکتر
- جریان نشتی کمتر
- عمر کارکرد طولانی
از جمله معایب این نوع خازن در مقایسه با خازنهای آلومینیومی میتوان به موارد زیر اشاره کرد:
- خازنهای تانتالیوم گرانتر هستند
- نسبت به افزایش ولتاژ اعمال شده در مقابل ولتاژ مجاز آن، همچنین معکوس شدن پلاریته حساسترند
- قابلیت تحمل جریانهای شارژ و دشارژ زیاد را ندارند
- خازنهای تانتالیوم دارای محدودیت ظرفیت هستند (حد اکثر تا ۳۳۰ میکرو فاراد ساخته میشوند)
خازنهای متغیر
به طور کلی با تغییر سه عامل میتوان ظرفیت خازن را تغیییر داد: «فاصله
صفحات»، «سطح صفحات» و «نوع دیالکتریک». اساس کار خازن متغیر بر مبنای
تغییر سطح مشترک صفحات خازن یا تغییر ضخامت دیالکتریک است، ظرفیت یک خازن
نسبت مستقیم با سطح مشترک دو صفحه خازن دارد. خازنهای متغیر عموماً ازنوع
عایق هوا یا پلاستیک هستند. نوعی که به وسیله دسته متحرک (محور) عمل تغییر
ظرفیت انجام میشود «واریابل» نامند و در نوع دیگر این عمل به وسیله پیچ
گوشتی صورت میگیرد که به آن «تریمر» گویند. محدوده ظرفیت خازنهای واریابل
۱۰ تا ۴۰۰ پیکو فاراد و در خازنهای تریمر از ۵ تا ۳۰ پیکو فاراد است. از
این خازنها در گیرندههای رادیویی برای تنظیم فرکانس ایستگاه رادیویی استفاده میشود.
در مدارات تیونینگ رادیویی از این خازنها استفاده میشود و به همین دلیل به این خازنها گاهی خازن تیونینگ
هم اطلاق میشود. ظرفیت این خازنها خیلی کم و در حدود ۱۰۰ تا ۵۰۰
پیکوفاراد است و بدلیل ظرفیت پایین در مدارات تایمینگ مورد استفاده قرار
نمیگیرند، در مدارات تایمینگ از خازنهای ثابت استفاده میشود و اگر نیاز
باشد دوره تناوب را تغییر دهیم، این عمل به کمک مقاومت انجام میشود.
خازنهای تریمر
خازنهای تریمر خازنهای متغیر کوچک و با ظرفیت بسیار پایین هستند.
ظرفیت این خازنها از حدود ۱ تا ۱۰۰ پیکوفاراد است و بیشتر در تیونرهای
مدارات با فرکانس بالا مورد استفاده قرار میگیرند. این خازنها معمولاً
دارای ۳ پایه هستند که نوع ۲ پایه عملاً فرقی در مونتاژ ندارد.
انواع خازن بر اساس شکل ظاهری آنها
خازن مسطح
خازنهای مسطح از دو صفحه هادی که بین آنها عایق یا دیالکتریک قرار دارد
تشکیل میشوند. صفحات هادی نسبتاً بزرگ هستند و در فاصلهای بسیار نزدیک
به هم قرار میگیرند. دیالکتریک
این نوع خازنها انواع مختلفی دارد و با ضریب مخصوصی که نسبت به هوا
سنجیده میشود، معرفی میگردد. این ضریب را ضریب دیالکتریک مینامند. برخی
دیگر بسیار کوچک و به اندازه یک دانه عدس میباشند.
انواع خازنها بر اساس دیالکتریک آنها

مواد به کار رفته در خازن. از چپ: سرامیک چندلایه، دیسک سرامیکی، فیلم پلیاستر چندلایه، سرامیکی لولهای،
یونولیت، فیلم پلیاستر متالیزهشده، الکترولیتی آلمینیوم.
- خازن کاغذی
- خازن الکترونیکی
- خازن سرامیکی
- خازن متغیر
کاربرد خازنها در مدارات دیجیتال و انالوگ
در مدارهای دیجیتال
از خازنها به عنوان عنصر ذخیره کنندهٔ انرژی استفاده میکنند که در یک
لحظه شارژ و در لحظه دیگر دی شارژ میشود ولی در مدارات انالوگ از خازن جهت
ایزوله کردن (جداساختن) دو منبع متناوب و مستقیم استفاده میشود. خازن در
برابر ولتاژ متناوب مثل اتصال کوتاه عمل میکند و اجازه ورود یا خروج
میدهد ولی در مقابل ولتاژ مستقیم همانند سد عمل میکند و اجازه ورود و یا
خارج شدن ولتاژ مستقیم از مدار را به قسمت تحت ایزوله خود نمیدهد.
شارژ یا پر کردن یک خازن

یک مدار خازنی-مقاومتی ساده که چگونگی شارژ خازن را نمایش میدهد.
وقتی که یک خازن بیبار را به دو سر یک باتری وصل کنیم؛ الکترونها
در مدار جاری میشوند. بدین ترتیب یکی از صفحات بار مثبت و صفحه دیگر بار
منفی پیدا میکند. آن صفحهای که به قطب مثبت باتری وصل شده؛ بار مثبت و
صفحه دیگر بار منفی پیدا میکند. خازن پس از ذخیره کردن مقدار معینی از بار
الکتریکی پر میشود. یعنی وجود اینکه کلید همچنان بستهاست، ولی جریانی از
مدار عبور نمیکند و در واقع جریان به صفر میرسد. یعنی به محض اینکه یک خازن خالی بدون بار را در یک مدار به مولد متصل کردیم؛ پس از مدتی کوتاه عقربه گالوانومتر دوباره روی صفر بر میگردد. یعنی دیگر جریانی از مدار عبور نمیکند. در این حالت میگوییم خازن پرشدهاست.
دشارژ یا تخلیه یک خازن
ابتدا خازنی را که پر است در نظر میگیریم. دو سر خازن را توسط یک سیم
به همدیگر وصل میکنیم. در این حالت برای مدت کوتاهی جریانی در مدار برقرار
میشود و این جریان تا زمانی که بار روی صفحات خازن وجود دارد برقرار است.
پس از مدت زمانی جریان صفر خواهد شد. یعنی دیگر باری بر روی صفحات خازن
وجود ندارد و خازن تخلیه شدهاست.
تأثیر ماده دیالکتریک
وقتی که خازنی را به مولدی وصل میکنیم؛ یک میدان یکنواخت در داخل خازن بوجود میآید. این میدان الکتریکی بر توزیع بارهای الکتریکی اتمهای عایقی که در بین صفحات قرار دارد اثر میگذارد و باعث میشود که دوقطبیهای
موجود در عایق طوری شکلگیری کنند؛ که در یک سمت عایق بارهای مثبت و در
سمت دیگر آن بارهای منفی تجمع یابند. توزیع بارهایی که در لبههای عایق
قرار دارند، بر بارهای روی صفحات خازن اثر میگذارد. یعنی بارهای منفی روی
لبههای عایق، بارهای مثبت بیشتری را روی صفحات خازن جمع میکند؛ و همینطور
بارهای مثبت روی لبههای عایق بارهای منفی بیشتری را روی صفحات خازن جمع
میکند. بنابراین با افزایش ثابت دیالکتریک (K) میتوان بارهای بیشتری را روی خازن جمع کرد و باعث افزایش ظرفیت یک خازن شد. با گذاشتن دیالکتریک در بین صفحات یک خازن ظرفیت آن افزایش مییابد.
میدان الکتریکی درون خازن تخت
در فضای بین صفحات خازن باردار میدان الکتریکی یکنواختی
برقرار میشود که جهت آن همواره از صفحه مثبت خازن به سمت صفحه منفی خازن
است. اندازه میدان همواره یک عدد ثابت میباشد و از فرمول زیر بدست میآید:

که در آن:
- E: میدان الکتریکی
- V: اختلاف پتانسیل دو سر خازن
- d: فاصله بین دو صفحه خازن
میدان الکتریکی با اختلاف پتانسیل دو سر خازن نسبت مستقیم و با فاصله بین صفحات خازن نسبت عکس دارد.
به هم بستن خازنها
خازنها در مدار به دو صورت بسته میشوند:
- موازی
- متوالی (سری)
بستن خازنها به روش موازی

خازنهایی که موازی به هم متصل شدهاند.
در بستن به روش موازی، بین خازنها دو نقطه اشتراک وجود دارد. در این روش:
- اختلاف پتانسیل برای همة خازنها یکی است.
- بار ذخیره شده در کل مدار برابر است با مجموع بارهای ذخیره شده در هریک از خازنها.
ظرفیت معادل در حالت موازی
با فرض اینکه سه خازن به نامهای ۱، ۲ و ۳ در اختیار داشته باشیم:
(Q:بار کل دو خازن است)
ظرفیت کل:
اندیسها مربوط به خازنهای ۱ ؛ ۲ و ۳ میباشد.
بنابراین هرگاه چند خازن باهم موازی باشند، ظرفیت خازن معادل برابر است با مجموع ظرفیت خازنها.
بستن خازنها بصورت متوالی

بستن خازنها به صورت سری.
در بستن به روش متوالی بین خازنها یک نقطه اشتراک وجود دارد و تنها دو
صفحه دو طرف مجموعه به مولد بسته شده و از مولد بار دریافت میکند؛ صفحات
مقابل نیز از طریق القاء بار الکتریکی دریافت میکنند. بنابراین اندازه بار
الکتریکی روی همه خازنها در این حالت باهم برابر است. در بستن خازنها به
طریق متوالی:
- بارهای روی صفحات هر خازن یکی است.
- اختلاف پتانسیل دو سر مدار برابر است با مجموع اختلاف پتانسیل دو سر هر یک از خازنها.
_(در حالت متوالی بین 2 خازن، ولتاژ دو برابر و میکرو فاراد تقسیم بر دو
میشود مثلاً دو خازن 25v 1000uF داریم. و اگر بطور متوالی به یکدیگر اتصال
دهیم، میشود: 50v 500uF )
ظرفیت معادل در حالت متوالی
بار کل:

اختلاف پتانسیل کل:



بنابراین وارون ظرفیت معادل در حالت متوالی، برابر است با مجموع وارون ظرفیت هریک از خازنها.
انرژی ذخیره شده در خازن
پر شدن یک خازن باعث بوجود آمدن بار
ذخیره در روی آن میشود و این هم باعث میشود که انرژی روی صفحات ذخیره
گردد. کاری که در فرایند پر شدن خازن (شارژ) انجام میشود را میتوان
محاسبه نمود.
کد رنگی خازنها
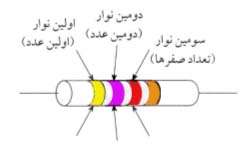
در خازنهای پلیستر برای سالهای زیادی از کدهای رنگی بر روی بدنه آنها
استفاده میشد. در این کدها سه رنگ اول ظرفیت را نشان میدهند و رنگ چهارم تولرانس (درصد خطا) را نشان میدهد. برای مثال قهوهای - مشکی - نارنجی، به معنی ۱۰۰۰۰ پیکوفاراد یا ۱۰ نانوفاراد
است. خازنهای پلیستر امروزه به وفور در مدارات الکترونیک مورد استفاده
قرار میگیرند. این خازنها در برابر حرارت زیاد معیوب میشوند و بنابراین
هنگام لحیمکاری باید به این نکته توجه داشت.
ترتیب رنگی خازنها به ترتیب از ۰ تا ۹ به صورت زیر است:
سیاه، قهوهای، قرمز، نارنجی، زرد، سبز، آبی، بنفش، خاکستری، سفید
خازنها با هر ظرفیتی وجود ندارند. بطور مثال خازنهای ۲۲ میکروفاراد یا
۴۷ میکروفاراد وجود دارند ولی خازنهای ۲۵ میکروفاراد یا ۱۱۷ میکروفاراد
وجود ندارند. دلیل اینکار چنین است:
فرض کنیم بخواهیم خازنها را با اختلاف ظرفیت ده تا ده تا بسازیم. مثلاً
۱۰ و ۲۰ و ۳۰ و.... در ابتدا خوب بهنظر میرسد ولی وقتی که به ظرفیت
مثلاً ۱۰۰۰ برسیم چه رخ میدهد؟ مثلاً ۱۰۰۰ و ۱۰۱۰ و ۱۰۲۰ و... که در
اینصورت اختلاف بین خازن ۱۰۰۰ میکروفاراد با ۱۰۱۰ میکروفاراد بسیار کم است و
فرقی با هم ندارند پس این مساله معقول بهنظر نمیرسد. برای ساختن یک رنج
محسوس از ارزش خازنها، میتوان برای اندازه ظرفیت از مضارب استاندارد ۱۰
استفاده نمود. مثلاً ۷/۴ - ۴۷ - ۴۷۰ و... و یا ۲/۲ - ۲۲۰ - ۲۲۰۰ و...
کد عددی خازنها
در خازنهای الکترولیتی معمولاً ظرفیت به صورت یک عدد مشخص با واحد
مربوطهاش (pf,nf و...) در کنار ولتاژ ذخیره سازی (حداکثر ولتاژ که در خازن
ذخیره میشود) نوشته شدهاست. اما در سایر خازنها یک عدد ۳ رقمی به همراه
یک حرف انگلیسی (k , j یا m)نوشته شدهاست. برای محاسبهٔ ظرفیت این نوع
خازنها دو عدد اول را در ده به توان عدد سوم ضرب میکنیم که واحد را بر
حسب پیکوفاراد
به دست میدهد. برای مثال اگر روی خازنی عدد 684k نوشته شده باشد به این
معنی است که ظرفیت این خازن برابر است با: ۱۰۰۰۰×۶۸ پیکوفاراد یعنی ۶۸۰ نانوفاراد یا ۰٫۶۸ میکروفاراد. حروف نیز به ترتیب بیانگر خطاهای پنج درصد برای j ده درصد برای k و بیست درصد برای m میباشند.[۲]
منابع
مصطفی و علیرضا درزی رامندی











 روبات چیست؟
روبات چیست؟






















































 مصطفی و علیرضادرزی رامندی
مصطفی و علیرضادرزی رامندی شرکت مایکروسافت
شرکت مایکروسافت